torch._dynamo 理解
0 概述
TorchDynamo 是一个 Python 级别的即时 (JIT) 编译器,旨在让未修改的 PyTorch 程序运行得更快。它通过 Python Frame Evaluation Hooks(Python 框架评估钩子)来实现这一目标,以便在运行时动态地生成和优化代码。这使得 TorchDynamo 可以有效地处理各种 Python 代码,包括包含控制流(如循环和条件语句)的代码,而无需进行任何修改。
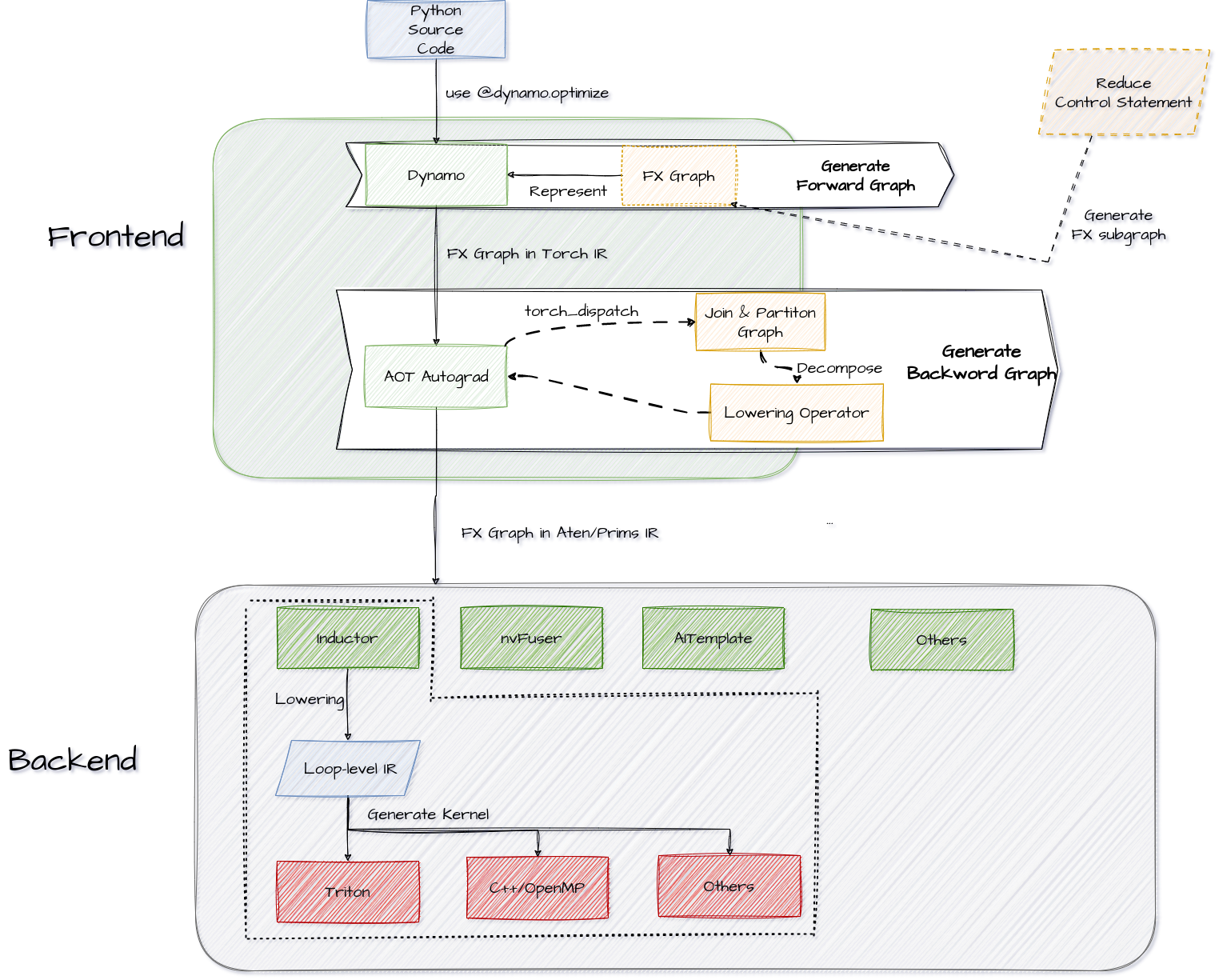
整个 pytorch 的编译栈如下:
1 Frontend
1.1 torch._dynamo
TorchDynamo 的作用是从 PyTorch 中抓取计算图。在dynamo 之前,PyTorch 有过许多尝试,例如 TorchScript,TorchFX,torch.jit.trace,lazy tensor 等,但结果都不尽人意。以至于在 Pytorch 的官方文档中也出现了官方吐槽:

正是基于此,pytorch 基于 Dynamo 投入了那么大量的资源进行开发,并发布了 2.0。
1.1.1 FX 计算图
FX 计算图实际上就是 torch.fx,是一种计算图的表示方法,也被称为 FX IR,FX IR 具备这样的特点:
- 定义简单,只有6个 Opcode
- 组织简单,很容易写出后续的解析代码
- 对正向图操作快速,并且 Trace 是 python2python 的,调试方便
- 不能表达控制流(例如 if-else 结构)
在 dynamo 中,也延续了使用 FX IR 来表示计算图的思路,但消除了不能表达控制流的缺陷。
1.1.2 Dynamo 优化原理(high-level)
在 pytorch 的官方文档中,对 TorchDynamo 的定义是一个 Python 级别的即时 (JIT) 编译器。
首先,先了解一下 python 的运行原理:
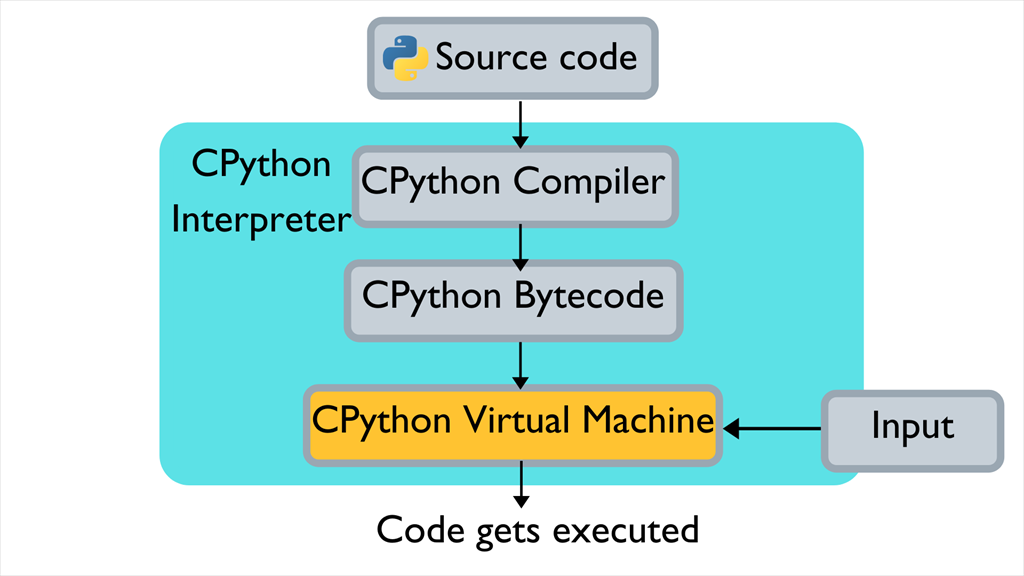
Python是通过解释器执行的,具体的机制如下:
- Python源代码被编译成一系列中间字节码
- 由CPython虚拟机内部 while 循环不断匹配字节码,并执行对应字节码指令 case 分支内部的多条C函数
例如,有如下 python 代码:
import dis
def add(x, y):
return x + y
print(dis.dis(add))
对应的字节码如下:
2 LOAD_FAST 0 (x)
4 LOAD_FAST 1 (y)
6 BINARY_OP 0 (+)
10 RETURN_VALUE
1.1.2.1 帧评估(Frame evaluation)
这里的帧,实际上和平时所说的函数栈有一些类似,下图可表示 Python 中的函数和 frame 之间的关系:
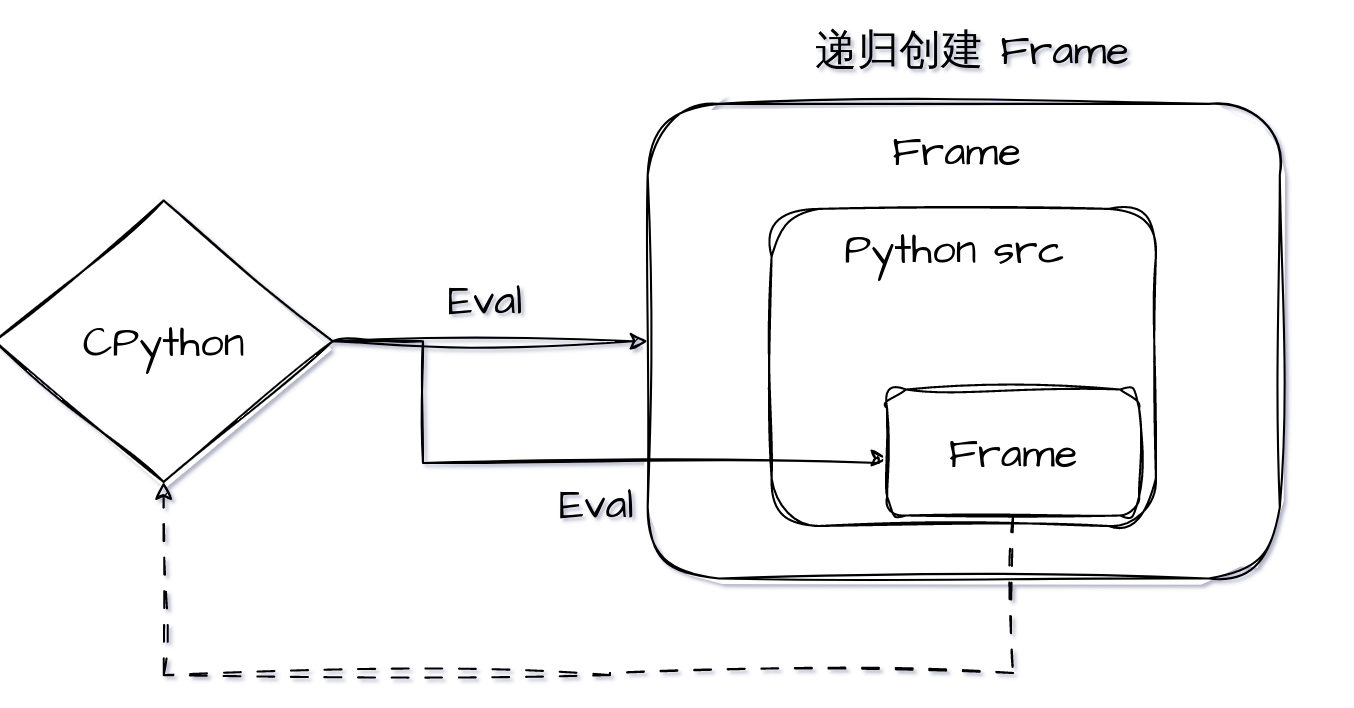
如上图所示,函数的调用栈,实际上就是递归地创建 frame(Python 内置的数据结构),执行frame 的过程。
import inspect
def foo():
frame = inspect.currentframe()
cur_func_frame = frame
print(f'code name of current frame is {cur_func_name.f_code.co_name}')
prev_func_frame = frame.f_back
print(f'current code name of previous frame is {prev_func_frame.f_code.co_name}')
def bar(a=1):
foo()
if __name__ == '__main__':
bar()
# 输出
# code name of current frame is foo
# current code name of previous frame is bar
从上面的结果可以看出,函数是运行在 Frame 中的,因此我们可以轻松地从 Frame 中获取任何函数需要的信息。例如我们可以通过上例在 frame 中获取到当前函数的名字 foo。由于 Python 的 frame 是栈式存储的,因此很简单就能访问到上一个 frame,进而获取上一帧所运行的函数名 bar。
更夸张一点,我们甚至能够在 func_a 中获取 func_b 定义的的局部变量 a:
def func_a():
frame = inspect.currentframe()
co_name = frame.f_code.co_name
print(f'code name of current frame is {co_name}')
pri_frame = frame.f_back
print(f'current code name of previous frame is {pri_frame.f_code.co_name}')
print(f'a={pri_frame.f_locals["a"]}')
从上面的两个例子不难得出结论:
- frame 包含了函数执行所需要的所有信息
- 我们可以在函数中访问 frame
实际上,frame 包含了函数的所有信息,那就意味着 frame 包含了代码信息。那么如果我们在执行函数之前就能通过 frame 获取到函数的代码信息,并且能够解析这个信息,那么就可以完成整个函数的 Trace。
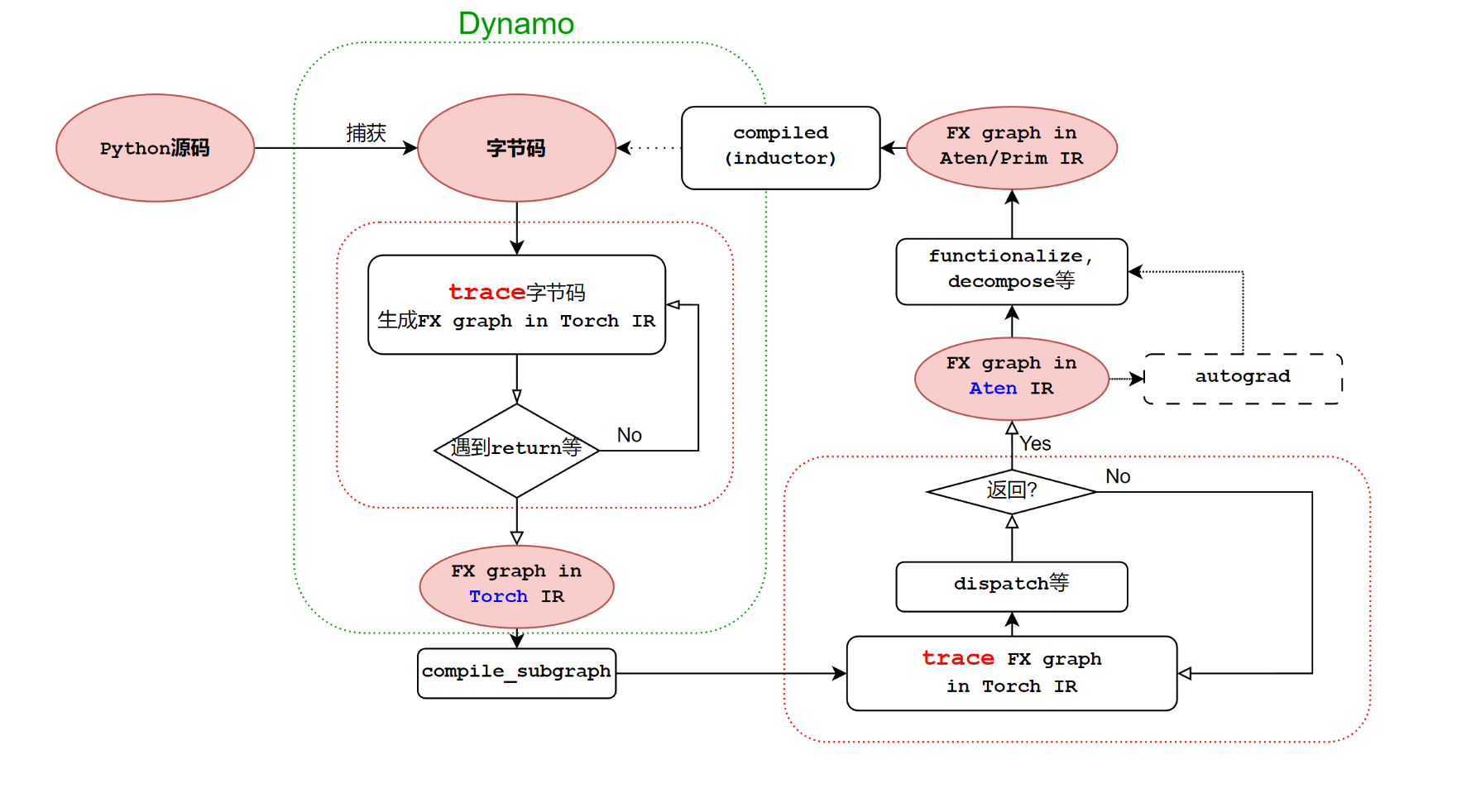
在官方的 dynamo 文档中,给出了 dynamo 的流程图:
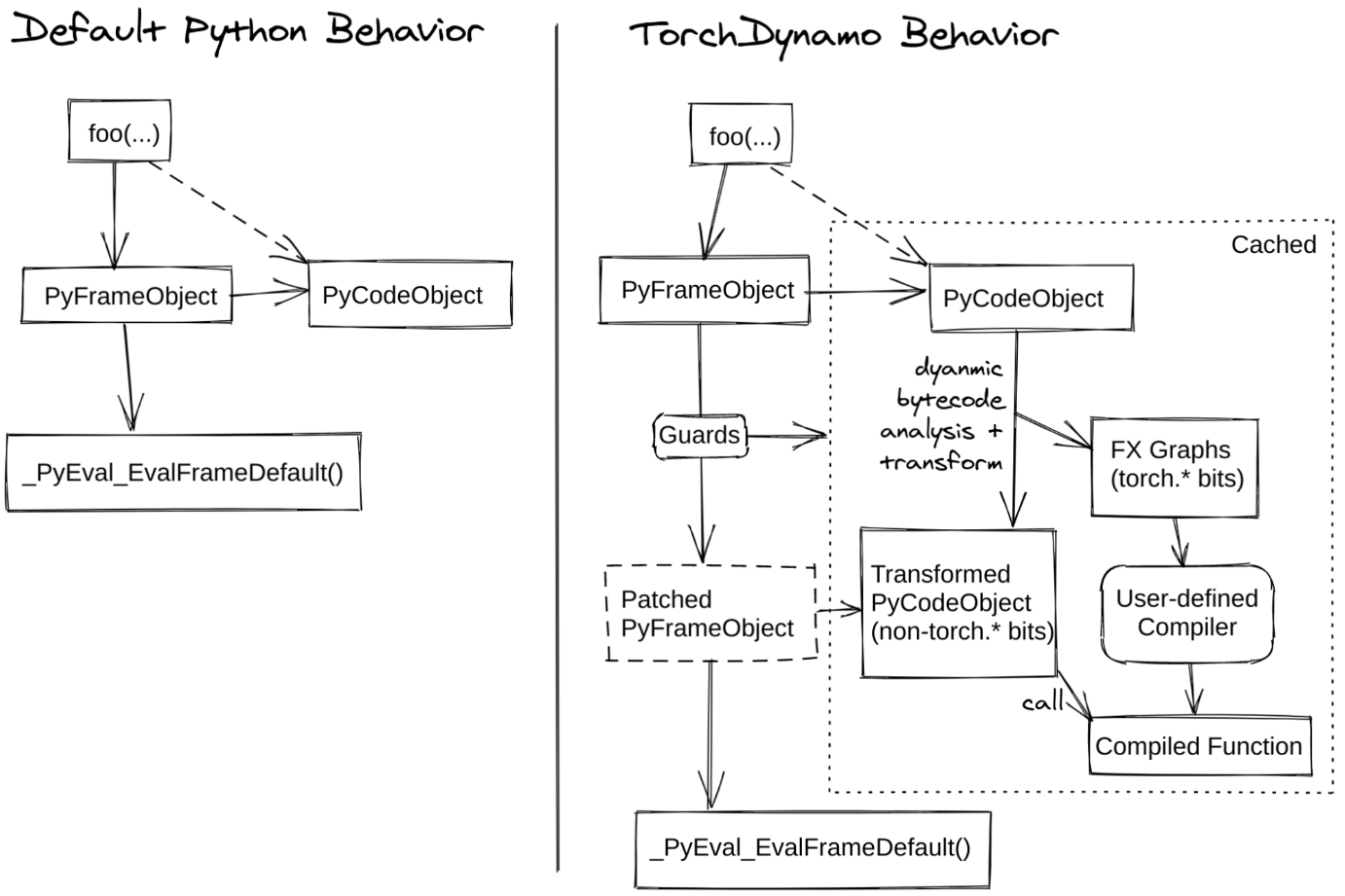
在上图右边的第一步就是在做解析 frame,通过这一步,可以得到PyFrameObject与PyCodeObject。
前面的代码例子里面都是针对单帧函数而言的,即我们特定地在 func_a 里去获取帧信息。然而模型实际运行时,其调用栈通常都会非常复杂,pytorch 提供了 PEP 523自动化地为每个函数额外加上解析 frame 的行为。
事实上,我们很难在 Python 层面想到一种方法,将某一个修改(例如刚才提到的函数入栈时解析 frame)递归地作用在所有的函数栈上(函数入口及其内部调用的所有接口)。这件事看上去很简单,但是做起来却非常的困难,甚至早期的 CPython 都没有开放这样功能,因此 PEP 523 应运而生。
前面提到的 Python的运行原理里面,有提到所有的 Frame evaluation 都是依赖于 CPython 解释器的。因此 PEP 523 认为,CPython 解释器的帧评估方式(Frame Evaluation)应该是可扩展的,这样用户就可以用自定义的方式进行 frame evaluation。这恰好和 Dynamo 的需求相符合:我们希望 model 内部所有的函数调用(同 frame evaluation),都能够附加一个解析 frame 的过程,以此来解析提炼 PyTorch 程序运行时的图结构。因此 Dynamo 扩展了 CPython 解释器 frame evaluation,在执行默认的帧评估函数之前,实现一些额外的 frame 解析优化的工作。
CPython 默认 Frame evaluation 的调用栈(以下代码片段摘自 Python 3.10,Python 3.11 对函数执行做了非常大的优化,以至于调用栈变得非常难懂): _PyEval_EvalFrameDefault –> call_function –> _PyFunction_Vectorcall –> _PyEval_Vector –> PyEval_EvalFrame –> _PyEval_EvalFrame
上述六个步骤,为 CPython 解释器执行一个函数时默认的调用栈, _PyEval_EvalFrame 中的代码片段:
_PyEval_EvalFrame(PyThreadState *tstate, PyFrameObject *f, int throwflag)
{
return tstate->interp->eval_frame(tstate, f, throwflag);
}
Python 会从线程状态(tstate)中获取解释器的 eval_frame 函数指针,默认情况下, CPython 解释器的 eval_frame 的函数指针就是 _PyEval_EvalFrameDefault。
Dynamo 想用自定义的流程去执行 frame(解析 Python 代码,编译优化等),那么最容易想到的就是更改 eval_frame 的指向,让解释器的 eval_frame 指向 Dynamo 自己实现的 custom frame evaluation function。
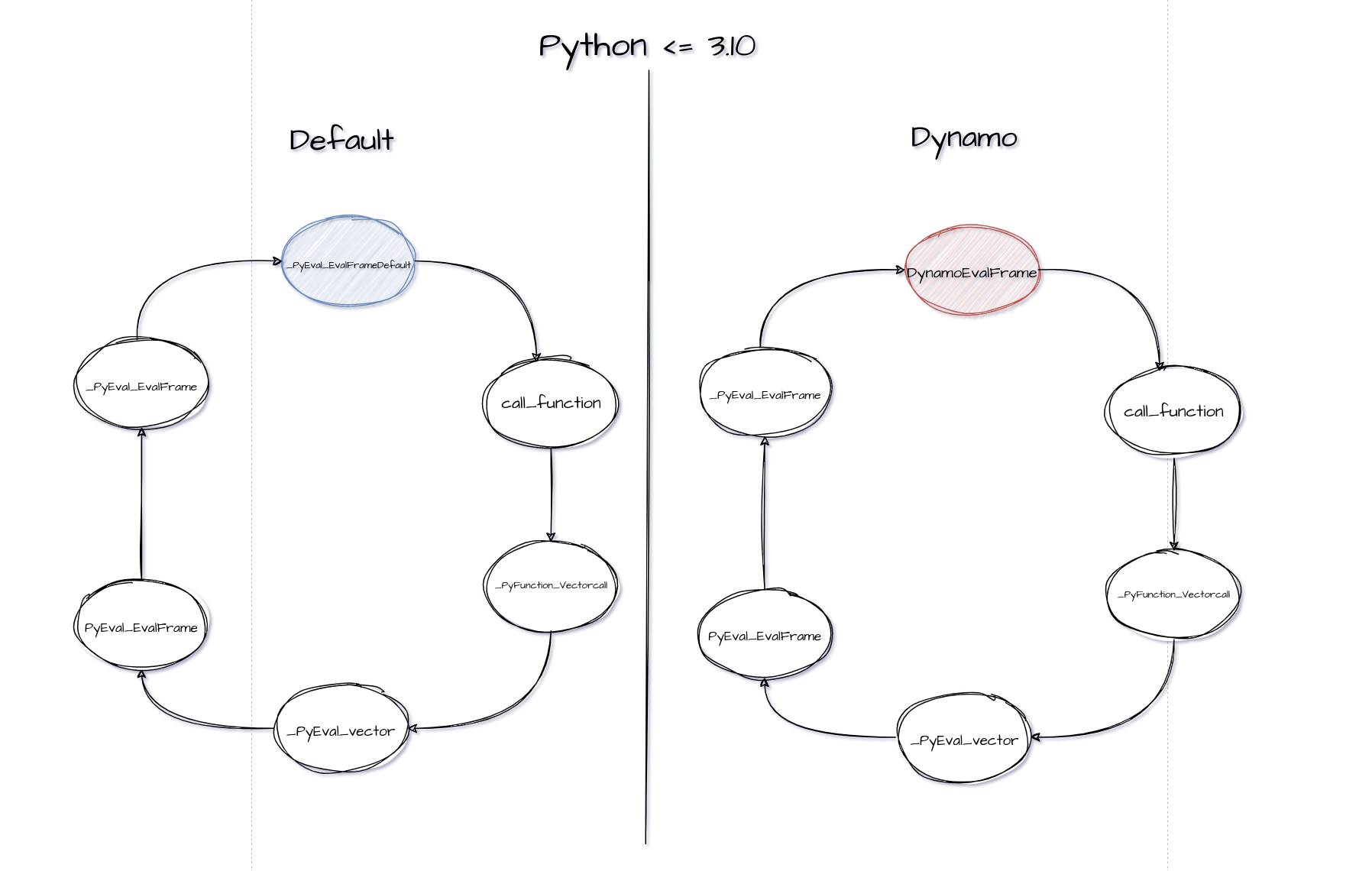
如上图所示,Dynamo 在 set_eval_frame 中将默认的 _PyEval_EvalFrameDefault 替换成 Dynamo 自定义的帧评估函数。事实上,Dynamo 在 Python 层面完成了字节码(Python 代码)的解析,重构以及 PyTorch 图结构的追踪,并将上述过程打包成一个回调函数,传给自定义的帧评估函数。
Dynamo 在 Python 层做字节码解析,以回调函数的形式传给自定义的帧评估函数。当我们调用 optimizer(‘inductor’)(fn) 时,Dynamo 会将 fn 的帧评估函数替换成 Dynamo 自定义的,并且传入回调函数。传入的回调函数会被自定义的帧评估函数调用。回调函数会解析重构 frame 中原有的字节码,并在过程中追踪模型计算图结构。帧评估时不是每次都会调用回调函数,例如某个 frame 已经被解析重构过了(cached),此时就会直接执行缓存里已经重构好的代码。
1.1.2.2 Graph Break
对于下面包含控制流的代码,
def toy_example(x):
a, b = nn.Linear(1, 1)(x), nn.Linear(1, 1)(x)
if x.sum() < 0:
return a + b
return a - b
这里的 x.sum() 会返回一个 Tensor,此时无论如何都没有办法仅凭输入去判断会走哪个分支。对于这种情况,dynamo 使用 graph break 来处理。
dynamo 会把 toy_example() 拆分为 3 张子图,不能处理的 if 语句由 Python 解释器执行。编译后对应的 Python 函数如下,执行完编译好的子图 __compiled_fn_0() 后,程序返回到 Python 解释器,根据 if 语句的结果选择执行还未编译的子图 __resume_at_30_1() 或 __resume_at_38_2():
def compiled_toy_example(x):
a, b, lt = __compiled_fn_0(x)
if lt:
return __resume_at_30_1(b, x)
else:
return __resume_at_38_2(b, x)
在这里包含三个不同的函数:
__compiled_fn_0(): dynamo 编译好的子图,对应 if 语句前面的部分:def __compiled_fn_0(x): a, b = nn.Linear(1, 1)(x), nn.Linear(1, 1)(x) return x.sum() < 0:__resume_at_30_1(): dynamo 未编译的子图,对应 if 分支 (dynamo 直接操纵字节码):# pseudo python code with goto and label def __resume_at_30_1(x): goto if_next a, b = nn.Linear(1, 1)(x), nn.Linear(1, 1)(x) if x.sum() < 0: label if_next return a + b return a - b该函数会在首次执行时被 dynamo 捕获并编译
__resume_at_38_2(): dynamo 未编译的子图,对应 else 分支,该函数也会在首次执行时被 dynamo 捕获并编译:# pseudo python code with goto and label def __resume_at_38_2(x): goto if_jump a, b = nn.Linear(1, 1)(x), nn.Linear(1, 1)(x) if x.sum() < 0: b = a + b label if_jump return a - b其字节码对应如下: ```python 22 0 LOAD_GLOBAL 3 (__compiled_fn_0) 2 LOAD_FAST 1 (x) 4 CALL_FUNCTION 1 6 UNPACK_SEQUENCE 3 8 STORE_FAST 3 (b) 10 STORE_FAST 2 (a) 12 POP_JUMP_IF_FALSE 12 (to 24) 14 LOAD_GLOBAL 4 (__resume_at_32_1) 16 LOAD_FAST 2 (a) 18 LOAD_FAST 3 (b) 20 CALL_FUNCTION 2 22 RETURN_VALUE » 24 LOAD_GLOBAL 5 (__resume_at_40_2) 26 LOAD_FAST 2 (a) 28 LOAD_FAST 3 (b) 30 CALL_FUNCTION 2 32 RETURN_VALUE
###### 1.1.2.3 循环展开
dynamo 把 Python 中的循环捕获为循环展开的计算图,即捕获的计算图中不再包含循环。例如下面的代码片段,其中的 for 循环迭代了 4 次、每次执行一次乘法操作:
```bash
@torch.compile
def toy_example(x, n):
for i in range(1, n + 1):
x = x * i
return x
def test():
x = torch.randn(10)
toy_example(x, 4)
捕获到的计算图对应的 Python 函数为:
def forward(self, x : torch.Tensor):
mul = x * 1; x = None
mul_1 = mul * 2; mul = None
mul_2 = mul_1 * 3; mul_1 = None
mul_3 = mul_2 * 4; mul_2 = None
return (mul_3,)
这个过程的原理是 dynamo 在它的 Python 虚拟机模拟器中模拟运行了 FOR_ITER 这条字节码指令,然后捕获在每次迭代中出现的运算,而不是把 for 循环本身捕获到计算图中。
1.1.2.4 内联函数
针对用户函数调用,dynamo 会尝试内联 (inline) 被调函数,从而生成更大的计算图。但如果被调函数中存在 Graph Break,那么内联就会失败,此时函数调用栈中的每个函数都会产生一个 graph break。
下面的代码片段中test()调用了递归函数toy_example():
@torch.compile
def toy_example(x, n):
if n > 0:
return toy_example(x, n-1) * n
else:
return x
def test():
x = torch.randn(10)
toy_example(x, 4)
dynamo 在捕获toy_example(x, 4)的计算图时,会尝试内联toy_example(x, 3)的计算图,依次类推,直到成功内联toy_example(x, 0)的计算图。最终生成一个大的计算图,其中的函数调用被展开:
def forward(self, x : torch.Tensor):
mul = x * 1; x = None
mul_1 = mul * 2; mul = None
mul_2 = mul_1 * 3; mul_1 = None
mul_3 = mul_2 * 4; mul_2 = None
return (mul_3,)
但在下面的代码片段中,用户函数baz()无法被内联,因为其中的 if 条件依赖于张量的值,只有在运行时才能确定执行哪个分支,故而存在一个 Graph Break。这个 Graph Break 导致其调用者bar()和foo都产生了子图,最后总共生成 7 个计算图:
def baz(x):
return -x if x > 0 else x - 1
def bar(x):
return x * baz(x - 1)
@torch.compile
def foo(x):
return x * bar(2 * x)
def test():
x = torch.tensor([4])
foo(x)
dynamo 通过字节码指令CALL_FUNCTION实现内联函数,其中识别用户函数调用并尝试内联,内联失败时恢复主调函数的状态并创建子图,子图编译完后返回解释器执行子函数调用。
1.1.2.5 Distributed Data Parallel
通过数据并行在多 GPU 上训练深度学习模型时,需要调用allreduce对所有 GPU 上的梯度进行规约。深度学习框架中往往都把一些参数的梯度放在一个bucket中,当这个bucket中的所有梯度都已经就绪后,就会使用allreduce进行梯度规约。
dynamo 捕获的计算图并不包含 DDP 的hook或者allreduce节点,如果整个模型被捕获为一张计算图,那么所有的allreduce都只能等到反向传播结束才能被触发,导致allreduce无法和反向传播overlap。为了能够在一个bucket中的梯度就绪时及时调用 allreduce进行通信,TorchDynamo 会在每个bucket的边界引入了 graph break。
1.2 Ahead Of Time Auto Gradient (AOTAutograd)
- 获取反向传播计算图
- 用不同的后端编译器分别编译正向传播和反向传播计算图
- 针对训练 (training) 做正向传播、反向传播联合优化,比如通过在反向传播中重算 (recompute) 来减少正向传播为反向传播保留的 tensor,从而削减内存需求;
通过这一步,计算图中的算子从 torch 转化到 ATen 算子,它们是 low-level 算子,而不是 Torch 级别的算子,例如 torch.sigmoid 会被下降为 torch.aten.ops.sigmoid.default()
由于 PyTorch 反向传播的计算图是在执行正向传播的过程中动态构建的,反向传播的计算图在正向传播结束时才能确定下来。AOTAutograd 以 Ahead-of-Time 的方式同时 trace 正向传播和反向传播,从而在函数真正执行之前拿到正向传播和反向传播的计算图。
总的来说,AOTAutograd 的工作流程 如下:
- 以 AOT 方式通过
__torch_dispatch__机制 trace 正向传播和反向传播,生成联合计算图 (joint forward and backward graph),它是包含Aten/Prim算子的FX Graph; - 用
partition_fn把joint graph划分为正向传播计算图和反向传播计算图; - 通过
decompositions把high-level算子分解、下沉到粒度更小的算子 (optional) - 调用
fw_compiler和bw_compiler分别编译正向传播计算图和反向传播计算图,通过TorchFX生成编译后的 Python 代码,并整合为一个torch.autograd.Function
1.2.1 torch_dispatch
__torch_dispatch__ 是 AOTAutograd 的核心模块。PyTorch 的核心是一个 dispatcher,它的功能是根据输入 tensor 的属性把算子 dispatch 到具体的 kernel 上,比如根据 tensor 的 device 属性决定是调用 CUDA kernel 还是 CPU 函数执行该算子。一个算子在 PyTorch 中往往要经过多次 dispatch,__torch_dispatch__ 给用户提供了一个入口,使得用户能够在算子最终 dispatch 前获取对应的算子和输入。
这个过程可以简化为查表,例如,我们现在有一个算子 mul,其运算的 device 为 cuda,于是我们可以从这个表中找到其底层算子实现的函数指针,从而返回。
每个aten算子都可能有其对应设备的实现(如果没有的话就会退化,例如cuda没有就可能采用默认的算子),通过查表,从而获得底层通过 C++ 实现的函数指针,然后将其返回,赋值给原来的算子,这样就能保证原来的算子可以去调用这个底层算子,从而提高运算效率。
例如 torch 中 Tensor 之间的 dot 运算,在这里就会通过 dispatch 映射到 aten::dot 上去,而这个是在底层 C++ 实现的,例如:
Tensor dot(const Tensor &self, const Tensor &other){
if (self.is_complex()) {
if (self.is_conj()) {
if (other.is_conj()) {
return (at::native::dot(self.conj(), other.conj())).conj();
} else {
return at::native::vdot(self.conj(), other);
}
} else if (other.is_conj()) {
return at::native::vdot(other.conj(), self);
}
}
at::NoNamesGuard guard;
dot_check(self, other);
if (self._is_zerotensor() || other._is_zerotensor()) {
return at::_efficientzerotensor({}, self.options());
}
if (use_mkldnn_bf16_matmul(self, other, /*result=*/Tensor())){
// mkldnn matmul expect result have sizes info to create ideep tensor
auto r = at::empty({1, 1}, self.options());
mkldnn_matmul(self, other, r, /*beta=*/0);
return r;
}
return AT_DISPATCH_ALL_TYPES_AND_COMPLEX_AND(at::ScalarType::BFloat16, self.scalar_type(), "dot", [&] {
Tensor result = at::empty({}, self.options());
result.fill_(dot_impl<scalar_t>(self.numel(), self.data_ptr<scalar_t>(), self.stride(0), other.data_ptr<scalar_t>(), other.stride(0)));
return result;
});
}
这一步是多线程完成的,在 C++ 中用了一个线程池,从而进行快速的映射,因此调试起来会比较困难。通过这一步,用户有机会在 kernel 执行前获取算子和参数,从而可以做很多事情,基于 __torch_dispatch__ 的 tracing 正是其中之一。
1.2.2 去重
前面提到,Torch FX 实现了 make_fx ,与常规的 symbolic tracing 不同,make_fx 是通过 torch_dispatch 实现的,AOTAutograd 的 tracing 正是用的 make_fx,
import torch
from torch.fx.experimental.proxy_tensor import make_fx
def f(x, y):
return x + y
x = torch.randn(8)
y = torch.randn(8)
g = make_fx(f)(x, y)
print(g.code)
'''输出
def forward(self, x_1, y_1):
add = torch.ops.aten.add.Tensor(x_1, y_1); x_1 = y_1 = None
return add
'''
symbolic tracing(也就是 FX 层面的 trace)得到的结果如下:
'''
def forward(self, x, y):
add = x + y; x = y = None
return add
'''
对比不难看出,FX 层得到的仍是 torch 级别的算子,而在 make_fx 中已经得到了 aten 的算子,但 make_fx 存在一些问题:当用于 trace 的输入参数中包含重复的 tensor 时,例如:
import torch
from torch.fx.experimental.proxy_tensor import make_fx
def f(x, y):
return x + y
x = torch.randn(8)
g = make_fx(f)(x, x)
print(g.code)
得到的结果如下:
'''
def forward(self, x_1, y_1):
add = torch.ops.aten.add.Tensor(y_1, y_1); y_1 = None
return add
'''
可以看到,得到的运算是 $y + y$,而不是 $x + y$。
除此之外,如果我们使用 torch.autograd.grad(f(x, y), (x, y)) 计算函数 f(x, y) 对 (x, y) 的梯度,但如果 x 和 y 是相同的 tensor,trace 出来的梯度就是错的。存在这样的问题是使用 __torch_dispatch__ 进行 tracing 时使用的是 tensor,而要建立的是 fx.Graph,这里会通过 tensor 的 ID(这里可以看作是哈希值)把 tensor 映射到 fx.Graph 中的节点,相同的 tensor 会被映射到 fx.Graph 中的同一个 Proxy,因而给被 trace 的函数实际参数去重就很有必要。
因此,AOTAutograd 会在 trace 开始前给函数去重,做法如下:
- 通过 detach 把待 trace 函数的重复参数变为
leaf tensor: 缺点是待 trace 函数不能改变重复参数,例如在重复 tensor 上调用in-place算子; - 把重复的参数从函数签名中移除: 捕获的计算图是针对重复参数特化的版本;
1.2.3 Joint Graph
有了基于__torch_dispatch__的 tracing 机制,AOTAutograd 就可以 trace 联合正向传播和反向传播计算图。这里的逻辑比较直接,如果要优化的正向传播函数fn,AOTAutograd 则构建并 trace 一个joint_forward_backward函数,其中调用正向传播函数fn之后,再调用torch.autograd.grad执行反向传播。
这里通过上述的make_fx来 trace joint_forward_backward函数。对于每个算子而言,都会触发__torch_dispatch__,直到遍历完所有的算子,得到一张完整的joint_graph。
1.2.3 Partition
AOTAutograd 用partition_fn把 joint graph 划分为正向传播计算图和反向传播计算图,目前内置了两种partition_fn:
- default_partition: 模拟了 PyTorch 的默认行为,找出从 forward 的输入到 forward 的输出的所有算子输出,其中被 backward 用到的 tensor 也作为 forward 的输出,是 forward 保留给 backward 的 tensor;
- min_cut_rematerialization_partition: 通过在 backward 中引入重算,减少 forward 给 backward 保留的 tensor,这种重算的思路与
gradient/activation checkpointing一致;
在划分图的时候需要考虑的问题很多,例如,应该按照什么标准来切分正向图和反向图,如何选择 forward 保留给 backward 的算子,其理由是什么。一般采取的原则是内存需求最少,这里切分使用的算法是最大流最小割:
- 在源节点 (source) 和 primals 之间各添加一条边,在所有的
tangent’s closure和目标节点 (sink) 之间各添加一条边,它们组成了一张从 source 到 sink 的有向图,边上的权重是 tensor size; - 需要找到一个合适的切分方法,把这个有向图分成两部分,使得 source 子图到 target 子图之间边上的权重之和最小,这是一个最小割问题;
- 最小割问题的对等问题是最大流问题,已经有标准的解法,直接在该有向图上运行
max-flow算法即可得到最佳划分方法
1.2.4 ecompose (Optional)
对于一些算子,会将其分解为细粒度的算子,例如BN,SiLU等,都会分解。这里以SiLU为例:
def fn(x):
m = nn.SILU(inplace=True)
return m(x)
此函数首先会被映射为aten.silu,随后,会进行分解到aten.ops级别:
 可以看到
可以看到aten.silu被分解为四步:两次转换,一次sigmoid和一次矩阵乘。
1.3 总结
前端的整体流程如下:
对于下面的代码:
if __name__ == '__main__':
model = nn.Sequential(
nn.Conv2d(16, 32, 3),
nn.BatchNorm2d(32),
nn.ReLU(),
).cuda()
model = torch.compile(model)
x = torch.randn((2, 16, 8, 8), requires_grad=True, device="cuda")
model(x)
通过前端 lowering 后,我们得到 aten/prims 级别的算子如下:
def forward(self, primals_1, primals_2, primals_3, primals_4, primals_5, primals_6, primals_7, primals_8):
clone = torch.ops.aten.clone.default(primals_5); primals_5 = None
clone_1 = torch.ops.aten.clone.default(primals_6); primals_6 = None
clone_2 = torch.ops.aten.clone.default(primals_7); primals_7 = None
convolution = torch.ops.aten.convolution.default(primals_8, primals_1, primals_2, [1, 1], [0, 0], [1, 1], False, [0, 0], 1); primals_2 = None
add = torch.ops.aten.add.Tensor(clone_2, 1); clone_2 = None
var_mean = torch.ops.aten.var_mean.correction(convolution, [0, 2, 3], correction = 0, keepdim = True)
getitem = var_mean[0]
getitem_1 = var_mean[1]; var_mean = None
add_1 = torch.ops.aten.add.Tensor(getitem, 1e-05)
rsqrt = torch.ops.aten.rsqrt.default(add_1); add_1 = None
sub = torch.ops.aten.sub.Tensor(convolution, getitem_1)
mul = torch.ops.aten.mul.Tensor(sub, rsqrt); sub = None
squeeze = torch.ops.aten.squeeze.dims(getitem_1, [0, 2, 3]); getitem_1 = None
squeeze_1 = torch.ops.aten.squeeze.dims(rsqrt, [0, 2, 3]); rsqrt = None
mul_1 = torch.ops.aten.mul.Tensor(squeeze, 0.1)
mul_2 = torch.ops.aten.mul.Tensor(clone, 0.9); clone = None
add_2 = torch.ops.aten.add.Tensor(mul_1, mul_2); mul_1 = mul_2 = None
squeeze_2 = torch.ops.aten.squeeze.dims(getitem, [0, 2, 3]); getitem = None
mul_3 = torch.ops.aten.mul.Tensor(squeeze_2, 1.0140845070422535); squeeze_2 = None
mul_4 = torch.ops.aten.mul.Tensor(mul_3, 0.1); mul_3 = None
mul_5 = torch.ops.aten.mul.Tensor(clone_1, 0.9); clone_1 = None
add_3 = torch.ops.aten.add.Tensor(mul_4, mul_5); mul_4 = mul_5 = None
unsqueeze = torch.ops.aten.unsqueeze.default(primals_3, -1)
unsqueeze_1 = torch.ops.aten.unsqueeze.default(unsqueeze, -1); unsqueeze = None
unsqueeze_2 = torch.ops.aten.unsqueeze.default(primals_4, -1); primals_4 = None
unsqueeze_3 = torch.ops.aten.unsqueeze.default(unsqueeze_2, -1); unsqueeze_2 = None
mul_6 = torch.ops.aten.mul.Tensor(mul, unsqueeze_1); mul = unsqueeze_1 = None
add_4 = torch.ops.aten.add.Tensor(mul_6, unsqueeze_3); mul_6 = unsqueeze_3 = None
relu = torch.ops.aten.relu.default(add_4); add_4 = None
le = torch.ops.aten.le.Scalar(relu, 0)
unsqueeze_4 = torch.ops.aten.unsqueeze.default(squeeze, 0); squeeze = None
unsqueeze_5 = torch.ops.aten.unsqueeze.default(unsqueeze_4, 2); unsqueeze_4 = None
unsqueeze_6 = torch.ops.aten.unsqueeze.default(unsqueeze_5, 3); unsqueeze_5 = None
return [add_2, add_3, add, relu, primals_1, primals_3, primals_8, convolution, squeeze_1, le, unsqueeze_6]
接着就会进入后端,进行代码生成。
2 Backend
后端整体流程如下:
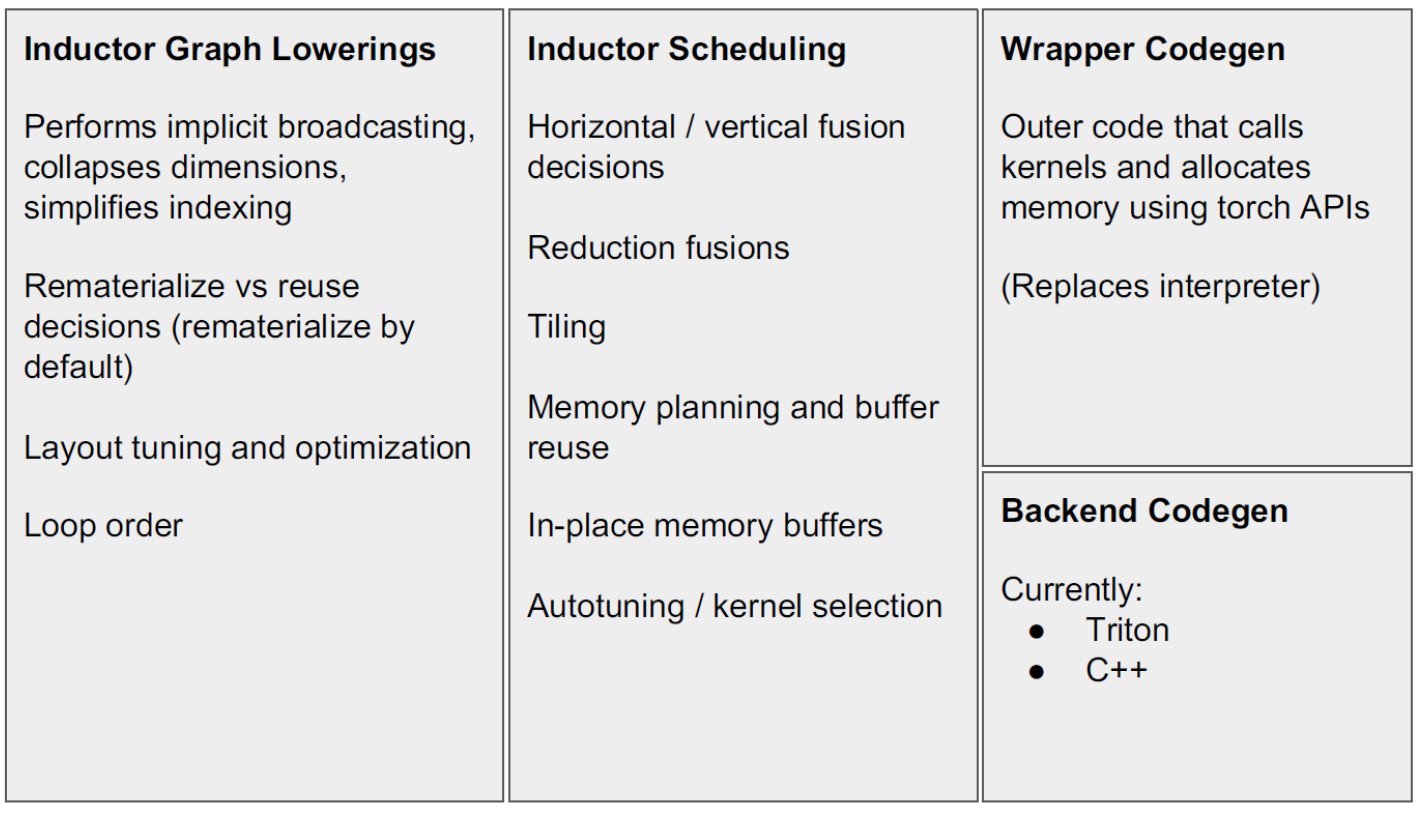
以 Triton 为例,首先会做一次 lowering,然后进行调度,最后才会生成 Triton 的 kernel。
2.1 Loop-level IR
这里的 lowering,使用loop-level IR来表示,其对aten IR的每一句话做解释,并且每次的解析都会与前文联系起来。这一层 IR 的类型有:
- PointWise
- Reduction
- TensorBox
- MatrixMultiplyAdd 除此之外,还有一些其他的类型。
这一层处理流程:
-
对于从前端拿到的
aten IR: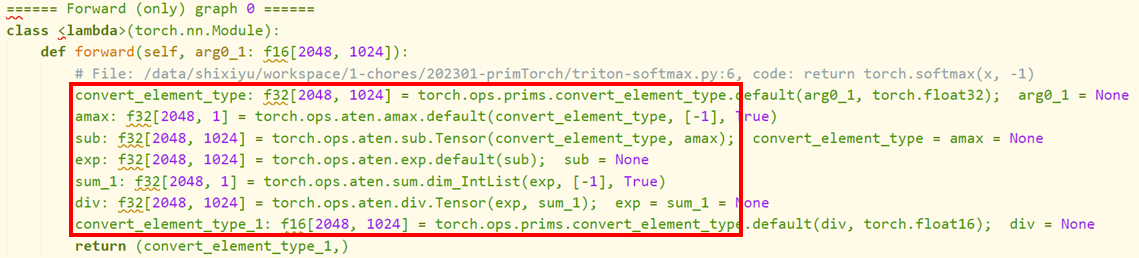
-
对于上面的每一句运算,都翻译为
loop-level IR:convert_element_type: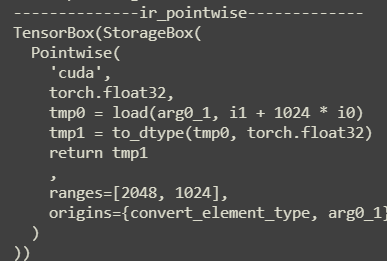
amax: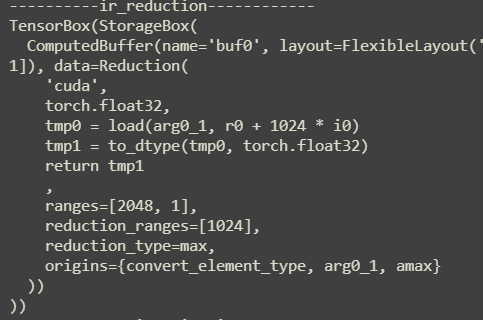 这里将计算的结果存储到
这里将计算的结果存储到buf0中sub: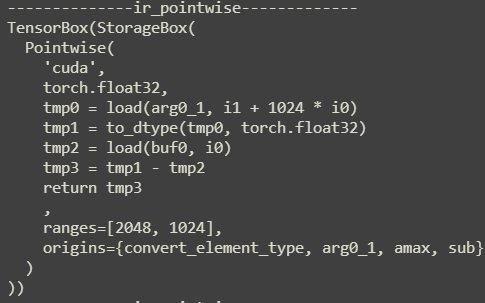 由于
由于amax将结果存储到buf0中,因此这里才能从buf0中直接 load 进来exp: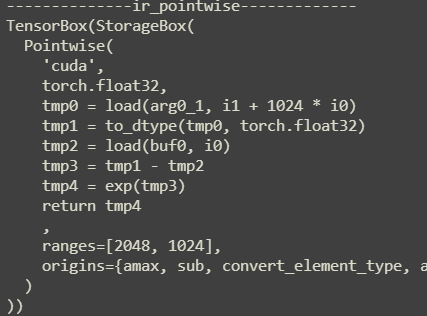 如果上一条 IR 是
如果上一条 IR 是pointwise的话,那么就会和这一次的进行归约,例如这里,只是在sub的 IR 上加上了tmp4 = exp(tmp3)并将 return 改为了tmp4这一层的 pass 会对aten IR的每一句话进行解析,并且每次的解析都会与前文联系起来,最终得到一个归约的loop-level IR。
2.2 Schedule
一下面的代码为例:
if __name__ == '__main__':
model = nn.Sequential(
nn.Conv2d(16, 32, 3),
nn.BatchNorm2d(32),
nn.ReLU(),
).cuda()
model = torch.compile(model)
x = torch.randn((2, 16, 8, 8), requires_grad=True, device="cuda")
model(x)
其在loop-level层构建出 11 个缓冲区。随后,对这些缓冲区进行 schedule,内容包括:
这里有些缓冲区启用了 Reduction,也就是说这里的归约是对于缓冲区而言的。将这些缓冲区放在一起,生成一个 kernel ,而其他的缓冲区,则单独生成自己的 kernel (注意这里的 kernel 是指 triton 的 kernel,实际上我们可以认为是一个函数)。只有 reduction 的 kernel 中会出现循环语句,若只是 pointwise 的计算,则不会生成循环
2.3 Triton Kernel
最后就是 triton kernel 的生成,其采取的策略是:
- 首先生成 load 语句
- 生成 compute 语句
- 生成 store 语句
- 组合三种语句为一个 kernel
- 组合所有 kernel 与一个 call 函数和 main 模块在一起为一个 .py 文件
上述例子生成的文件如下:
from ctypes import c_void_p, c_long
import torch
import math
import random
from torch import empty_strided, as_strided, device
from torch._inductor.codecache import AsyncCompile
from torch._inductor.select_algorithm import extern_kernels
aten = torch.ops.aten
assert_size_stride = torch._C._dynamo.guards.assert_size_stride
async_compile = AsyncCompile()
import triton
import triton.language as tl
from torch._inductor.triton_ops.autotune import grid
from torch._C import _cuda_getCurrentRawStream as get_cuda_stream
triton__0 = async_compile.triton('''
import triton
import triton.language as tl
from torch._inductor.ir import ReductionHint
from torch._inductor.ir import TileHint
from torch._inductor.triton_ops.autotune import pointwise
from torch._inductor.utils import instance_descriptor
@pointwise(size_hints=[4096], filename=__file__, meta={'signature': {0: '*fp32', 1: '*fp32', 2: 'i32'}, 'device': 0, 'constants': {}, 'mutated_arg_names': ['in_out_ptr0'], 'configs': [instance_descriptor(divisible_by_16=(0, 1, 2), equal_to_1=())]})
@triton.jit
def triton_(in_out_ptr0, in_ptr0, xnumel, XBLOCK : tl.constexpr):
xnumel = 2304
xoffset = tl.program_id(0) * XBLOCK
xindex = xoffset + tl.arange(0, XBLOCK)[:]
xmask = xindex < xnumel
x3 = xindex
x1 = (xindex // 36) % 32
tmp0 = tl.load(in_out_ptr0 + (x3), xmask)
tmp1 = tl.load(in_ptr0 + (x1), xmask)
tmp2 = tmp0 + tmp1
tl.store(in_out_ptr0 + (x3 + tl.zeros([XBLOCK], tl.int32)), tmp2, xmask)
''')
triton__1 = async_compile.triton('''
import triton
import triton.language as tl
from torch._inductor.ir import ReductionHint
from torch._inductor.ir import TileHint
from torch._inductor.triton_ops.autotune import reduction
from torch._inductor.utils import instance_descriptor
@reduction(
size_hints=[32, 128],
reduction_hint=ReductionHint.INNER,
filename=__file__,
meta={'signature': {0: '*fp32', 1: '*fp32', 2: '*fp32', 3: '*fp32', 4: '*fp32', 5: '*fp32', 6: '*fp32', 7: '*fp32', 8: 'i32', 9: 'i32'}, 'device': 0, 'constants': {}, 'mutated_arg_names': ['in_out_ptr0'], 'configs': [instance_descriptor(divisible_by_16=(0, 1, 2, 3, 4, 5, 6, 7, 8), equal_to_1=())]}
)
@triton.jit
def triton_(in_out_ptr0, in_ptr0, in_ptr1, in_ptr2, out_ptr0, out_ptr1, out_ptr2, out_ptr3, xnumel, rnumel, XBLOCK : tl.constexpr, RBLOCK : tl.constexpr):
xnumel = 32
rnumel = 72
xoffset = tl.program_id(0) * XBLOCK
xindex = xoffset + tl.arange(0, XBLOCK)[:, None]
xmask = xindex < xnumel
rbase = tl.arange(0, RBLOCK)[None, :]
x0 = xindex
_tmp1 = tl.zeros([XBLOCK, RBLOCK], tl.float32) + 0
for roffset in range(0, rnumel, RBLOCK):
rindex = roffset + rbase
rmask = rindex < rnumel
r1 = rindex % 36
r2 = (rindex // 36)
tmp0 = tl.load(in_ptr0 + (r1 + (36*x0) + (1152*r2)), rmask & xmask, eviction_policy='evict_last', other=0)
_tmp1 = tl.where(rmask & xmask, _tmp1 + tmp0, _tmp1)
tmp1 = tl.sum(_tmp1, 1)[:, None]
tmp6 = tl.load(in_ptr1 + (x0), xmask)
tmp2 = 72.0
tmp3 = tmp1 / tmp2
tmp4 = 0.1
tmp5 = tmp3 * tmp4
tmp7 = 0.9
tmp8 = tmp6 * tmp7
tmp9 = tmp5 + tmp8
tl.store(in_out_ptr0 + (x0 + tl.zeros([XBLOCK, 1], tl.int32)), tmp3, xmask)
tl.store(out_ptr0 + (x0 + tl.zeros([XBLOCK, 1], tl.int32)), tmp9, xmask)
_tmp13 = tl.zeros([XBLOCK, RBLOCK], tl.float32) + 0
for roffset in range(0, rnumel, RBLOCK):
rindex = roffset + rbase
rmask = rindex < rnumel
r1 = rindex % 36
r2 = (rindex // 36)
tmp10 = tl.load(in_ptr0 + (r1 + (36*x0) + (1152*r2)), rmask & xmask, eviction_policy='evict_last', other=0)
tmp11 = tmp10 - tmp3
tmp12 = tmp11 * tmp11
_tmp13 = tl.where(rmask & xmask, _tmp13 + tmp12, _tmp13)
tmp13 = tl.sum(_tmp13, 1)[:, None]
tl.store(out_ptr1 + x0, tmp13, xmask)
tmp23 = tl.load(in_ptr2 + (x0), xmask)
tmp14 = 72.0
tmp15 = tmp13 / tmp14
tmp16 = 1e-05
tmp17 = tmp15 + tmp16
tmp18 = tl.libdevice.rsqrt(tmp17)
tmp19 = 1.0140845070422535
tmp20 = tmp15 * tmp19
tmp21 = 0.1
tmp22 = tmp20 * tmp21
tmp24 = 0.9
tmp25 = tmp23 * tmp24
tmp26 = tmp22 + tmp25
tl.store(out_ptr2 + (x0 + tl.zeros([XBLOCK, 1], tl.int32)), tmp18, xmask)
tl.store(out_ptr3 + (x0 + tl.zeros([XBLOCK, 1], tl.int32)), tmp26, xmask)
''')
triton__2 = async_compile.triton('''
import triton
import triton.language as tl
from torch._inductor.ir import ReductionHint
from torch._inductor.ir import TileHint
from torch._inductor.triton_ops.autotune import pointwise
from torch._inductor.utils import instance_descriptor
@pointwise(size_hints=[4096], filename=__file__, meta={'signature': {0: '*fp32', 1: '*fp32', 2: '*fp32', 3: '*fp32', 4: '*fp32', 5: '*fp32', 6: '*i1', 7: 'i32'}, 'device': 0, 'constants': {}, 'mutated_arg_names': [], 'configs': [instance_descriptor(divisible_by_16=(0, 1, 2, 3, 4, 5, 6, 7), equal_to_1=())]})
@triton.jit
def triton_(in_ptr0, in_ptr1, in_ptr2, in_ptr3, in_ptr4, out_ptr0, out_ptr1, xnumel, XBLOCK : tl.constexpr):
xnumel = 2304
xoffset = tl.program_id(0) * XBLOCK
xindex = xoffset + tl.arange(0, XBLOCK)[:]
xmask = xindex < xnumel
x3 = xindex
x1 = (xindex // 36) % 32
tmp0 = tl.load(in_ptr0 + (x3), xmask)
tmp1 = tl.load(in_ptr1 + (x1), xmask)
tmp3 = tl.load(in_ptr2 + (x1), xmask)
tmp10 = tl.load(in_ptr3 + (x1), xmask)
tmp12 = tl.load(in_ptr4 + (x1), xmask)
tmp2 = tmp0 - tmp1
tmp4 = 72.0
tmp5 = tmp3 / tmp4
tmp6 = 1e-05
tmp7 = tmp5 + tmp6
tmp8 = tl.libdevice.rsqrt(tmp7)
tmp9 = tmp2 * tmp8
tmp11 = tmp9 * tmp10
tmp13 = tmp11 + tmp12
tmp14 = tl.where(0 != 0, 0, tl.where(0 > tmp13, 0, tmp13))
tmp15 = 0.0
tmp16 = tmp14 <= tmp15
tl.store(out_ptr0 + (x3 + tl.zeros([XBLOCK], tl.int32)), tmp14, xmask)
tl.store(out_ptr1 + (x3 + tl.zeros([XBLOCK], tl.int32)), tmp16, xmask)
''')
triton__3 = async_compile.triton('''
import triton
import triton.language as tl
from torch._inductor.ir import ReductionHint
from torch._inductor.ir import TileHint
from torch._inductor.triton_ops.autotune import pointwise
from torch._inductor.utils import instance_descriptor
@pointwise(size_hints=[1], filename=__file__, meta={'signature': {0: '*i64', 1: '*i64', 2: 'i32'}, 'device': 0, 'constants': {}, 'mutated_arg_names': [], 'configs': [instance_descriptor(divisible_by_16=(0, 1), equal_to_1=())]})
@triton.jit
def triton_(in_ptr0, out_ptr0, xnumel, XBLOCK : tl.constexpr):
xnumel = 1
xoffset = tl.program_id(0) * XBLOCK
xindex = xoffset + tl.arange(0, XBLOCK)[:]
xmask = xindex < xnumel
tmp0_load = tl.load(in_ptr0 + (0))
tmp0 = tl.broadcast_to(tmp0_load, [XBLOCK])
tmp1 = 1
tmp2 = tmp0 + tmp1
tl.store(out_ptr0 + (0 + tl.zeros([XBLOCK], tl.int32)), tmp2, None)
''')
async_compile.wait(globals())
del async_compile
def call(args):
primals_1, primals_2, primals_3, primals_4, primals_5, primals_6, primals_7, primals_8 = args
args.clear()
with torch.cuda._DeviceGuard(0):
torch.cuda.set_device(0) # no-op to ensure context
buf0 = aten.convolution(primals_8, primals_1, None, (1, 1), (0, 0), (1, 1), False, (0, 0), 1)
assert_size_stride(buf0, (2, 32, 6, 6), (1152, 36, 6, 1))
buf1 = buf0; del buf0 # reuse
stream0 = get_cuda_stream(0)
triton__0.run(buf1, primals_2, 2304, grid=grid(2304), stream=stream0)
del primals_2
buf2 = empty_strided((1, 32, 1, 1), (32, 1, 32, 32), device='cuda', dtype=torch.float32)
buf3 = buf2; del buf2 # reuse
buf6 = empty_strided((32, ), (1, ), device='cuda', dtype=torch.float32)
buf4 = empty_strided((1, 32, 1, 1), (32, 1, 32, 32), device='cuda', dtype=torch.float32)
buf5 = empty_strided((32, ), (1, ), device='cuda', dtype=torch.float32)
buf7 = empty_strided((32, ), (1, ), device='cuda', dtype=torch.float32)
triton__1.run(buf3, buf1, primals_5, primals_6, buf6, buf4, buf5, buf7, 32, 72, grid=grid(32), stream=stream0)
del primals_5
del primals_6
buf8 = empty_strided((2, 32, 6, 6), (1152, 36, 6, 1), device='cuda', dtype=torch.float32)
buf9 = empty_strided((2, 32, 6, 6), (1152, 36, 6, 1), device='cuda', dtype=torch.bool)
triton__2.run(buf1, buf3, buf4, primals_3, primals_4, buf8, buf9, 2304, grid=grid(2304), stream=stream0)
del buf4
del primals_4
buf10 = empty_strided((), (), device='cuda', dtype=torch.int64)
triton__3.run(primals_7, buf10, 1, grid=grid(1), stream=stream0)
del primals_7
return (buf6, buf7, buf10, buf8, primals_1, primals_3, primals_8, buf1, buf5, buf9, as_strided(buf3, (1, 32, 1, 1), (32, 1, 1, 1)), )
if __name__ == "__main__":
from torch._dynamo.testing import rand_strided
from torch._inductor.utils import print_performance
primals_1 = rand_strided((32, 16, 3, 3), (144, 9, 3, 1), device='cuda:0', dtype=torch.float32)
primals_2 = rand_strided((32, ), (1, ), device='cuda:0', dtype=torch.float32)
primals_3 = rand_strided((32, ), (1, ), device='cuda:0', dtype=torch.float32)
primals_4 = rand_strided((32, ), (1, ), device='cuda:0', dtype=torch.float32)
primals_5 = rand_strided((32, ), (1, ), device='cuda:0', dtype=torch.float32)
primals_6 = rand_strided((32, ), (1, ), device='cuda:0', dtype=torch.float32)
primals_7 = rand_strided((), (), device='cuda:0', dtype=torch.int64)
primals_8 = rand_strided((2, 16, 8, 8), (1024, 64, 8, 1), device='cuda:0', dtype=torch.float32)
print_performance(lambda: call([primals_1, primals_2, primals_3, primals_4, primals_5, primals_6, primals_7, primals_8]))
此文件生成在/tmp文件夹中,后缀为py ,后续直接运行此文件,可得到 performace 的值,同样,也可在运行中捕获到运算的值。
2.4 loop-level IR –> triton kernel
通过数据结构GraphLowering的方法run(*example_input)也就是一个Fake Tensor来生成 triton kernel:
Graph ID : 0
Input : {
'primals_1': TensorBox(StorageBox(
InputBuffer(name='primals_1', layout=FixedLayout('cuda', torch.float32, size=[32, 16, 3, 3], stride=[144, 9, 3, 1]))
)),
'primals_2': TensorBox(StorageBox(
InputBuffer(name='primals_2', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
)),
'primals_3': TensorBox(StorageBox(
InputBuffer(name='primals_3', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
)),
'primals_4': TensorBox(StorageBox(
InputBuffer(name='primals_4', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
)),
'primals_5': TensorBox(StorageBox(
InputBuffer(name='primals_5', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
)),
'primals_6': TensorBox(StorageBox(
InputBuffer(name='primals_6', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
)),
'primals_7': TensorBox(StorageBox(
InputBuffer(name='primals_7', layout=FixedLayout('cuda', torch.int64, size=[], stride=[]))
)),
'primals_8': TensorBox(StorageBox(
InputBuffer(name='primals_8', layout=FixedLayout('cuda', torch.float32, size=[2, 16, 8, 8], stride=[1024, 64, 8, 1]))
))}
Origin Input : {
'primals_1': InputBuffer(name='primals_1', layout=FixedLayout('cuda', torch.float32, size=[32, 16, 3, 3], stride=[144, 9, 3, 1])),
'primals_2': InputBuffer(name='primals_2', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1])),
'primals_3': InputBuffer(name='primals_3', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1])),
'primals_4': InputBuffer(name='primals_4', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1])),
'primals_5': InputBuffer(name='primals_5', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1])),
'primals_6': InputBuffer(name='primals_6', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1])),
'primals_7': InputBuffer(name='primals_7', layout=FixedLayout('cuda', torch.int64, size=[], stride=[])),
'primals_8': InputBuffer(name='primals_8', layout=FixedLayout('cuda', torch.float32, size=[2, 16, 8, 8], stride=[1024, 64, 8, 1]))}
Output : [
StorageBox(ComputedBuffer(name='buf6', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf3, i0)
tmp1 = constant(0.1, torch.float32)
tmp2 = tmp0 * tmp1
tmp3 = load(primals_5, i0)
tmp4 = constant(0.9, torch.float32)
tmp5 = tmp3 * tmp4
tmp6 = tmp2 + tmp5
return tmp6
,
ranges=[32],
origins={add_2}
))
),
StorageBox(ComputedBuffer(name='buf7', layout=FixedLayout('cuda', torch.float32, size=(32,), stride=[1]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf4, i0)
tmp1 = index_expr(72, torch.float32)
tmp2 = tmp0 / tmp1
tmp3 = constant(1.0140845070422535, torch.float32)
tmp4 = tmp2 * tmp3
tmp5 = constant(0.1, torch.float32)
tmp6 = tmp4 * tmp5
tmp7 = load(primals_6, i0)
tmp8 = constant(0.9, torch.float32)
tmp9 = tmp7 * tmp8
tmp10 = tmp6 + tmp9
return tmp10
,
ranges=(32,),
origins={add_3}
))
),
StorageBox(ComputedBuffer(name='buf10', layout=FixedLayout('cuda', torch.int64, size=[], stride=[]), data=Pointwise(
'cuda',
torch.int64,
tmp0 = load(primals_7, 0)
tmp1 = constant(1, torch.int64)
tmp2 = tmp0 + tmp1
return tmp2
,
ranges=[],
origins={primals_7, clone_2, add}
))
),
StorageBox(ComputedBuffer(name='buf8', layout=FixedLayout('cuda', torch.float32, size=[2, 32, 6, 6], stride=[1152, 36, 6, 1]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf1, i3 + 6 * i2 + 36 * i1 + 1152 * i0)assembly
tmp1 = load(buf3, i1)
tmp2 = tmp0 - tmp1
tmp3 = load(buf4, i1)
tmp4 = index_expr(72, torch.float32)
tmp5 = tmp3 / tmp4
tmp6 = constant(1e-05, torch.float32)
tmp7 = tmp5 + tmp6
tmp8 = rsqrt(tmp7)
tmp9 = tmp2 * tmp8
tmp10 = load(primals_3, i1)
tmp11 = tmp9 * tmp10
tmp12 = load(primals_4, i1)
tmp13 = tmp11 + tmp12
tmp14 = relu(tmp13)
return tmp14
,
ranges=[2, 32, 6, 6],
origins={relu}
))
),
StorageBox(InputBuffer(name='primals_1', layout=FixedLayout('cuda', torch.float32, size=[32, 16, 3, 3], stride=[144, 9, 3, 1]))
),
StorageBox(InputBuffer(name='primals_3', layout=FixedLayout('cuda', torch.float32, size=[32], stride=[1]))
),
StorageBox(InputBuffer(name='primals_8', layout=FixedLayout('cuda', torch.float32, size=[2, 16, 8, 8], stride=[1024, 64, 8, 1]))
),
StorageBox(ComputedBuffer(name='buf1', layout=FixedLayout('cuda', torch.float32, size=[2, 32, 6, 6], stride=[1152, 36, 6, 1]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf0, i3 + 6 * i2 + 36 * i1 + 1152 * i0)
tmp1 = load(primals_2, i1)
tmp2 = tmp0 + tmp1
return tmp2
,
ranges=[2, 32, 6, 6],
origins={convolution}
))
),
StorageBox(ComputedBuffer(name='buf5', layout=FixedLayout('cuda', torch.float32, size=(32,), stride=[1]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf4, i0)
tmp1 = index_expr(72, torch.float32)
tmp2 = tmp0 / tmp1
tmp3 = constant(1e-05, torch.float32)
tmp4 = tmp2 + tmp3
tmp5 = rsqrt(tmp4)
return tmp5
,
ranges=(32,),
origins={squeeze_1}
))
),
StorageBox(ComputedBuffer(name='buf9', layout=FixedLayout('cuda', torch.bool, size=[2, 32, 6, 6], stride=[1152, 36, 6, 1]), data=Pointwise(
'cuda',
torch.bool,
tmp0 = load(buf8, i3 + 6 * i2 + 36 * i1 + 1152 * i0)
tmp1 = constant(0, torch.float32)
tmp2 = tmp0 <= tmp1
return tmp2
,
ranges=[2, 32, 6, 6],
origins={le}
))
),
ReinterpretView(StorageBox(ComputedBuffer(name='buf3', layout=FixedLayout('cuda', torch.float32, size=[1, 32, 1, 1], stride=[32, 1, 32, 32]), data=Pointwise(
'cuda',
torch.float32,
tmp0 = load(buf2, i1)
tmp1 = index_expr(72, torch.float32)
tmp2 = tmp0 / tmp1
return tmp2
,
ranges=[1, 32, 1, 1],
origins={convolution, var_mean}
))
),
FixedLayout('cuda', torch.float32, size=[1, 32, 1, 1], stride=[32, 1, 1, 1]),
no origins?
)]
2.5 调度的目的
- 调度的目的:由于在前面已经进行了 decompose (一般在转为 aten 算子的时候就已经完成了),因此这里的目的是为了调整 buff 的次序,也就是调度内存,以优化内存访问的效率。
2.6 aten IR –> loop-level IR
aten IR到loop-level IR在torch/_inductor/compile_fx.py 中 #179 完成的,其中,输入的 gm 中存储的 code 为:
def forward(self, primals_1, primals_2, primals_3, primals_4, primals_5, primals_6, primals_7, primals_8):
clone = torch.ops.aten.clone.default(primals_5); primals_5 = None
clone_1 = torch.ops.aten.clone.default(primals_6); primals_6 = None
clone_2 = torch.ops.aten.clone.default(primals_7); primals_7 = None
convolution = torch.ops.aten.convolution.default(primals_8, primals_1, primals_2, [1, 1], [0, 0], [1, 1], False, [0, 0], 1); primals_2 = None
add = torch.ops.aten.add.Tensor(clone_2, 1); clone_2 = None
var_mean = torch.ops.aten.var_mean.correction(convolution, [0, 2, 3], correction = 0, keepdim = True)
getitem = var_mean[0]
getitem_1 = var_mean[1]; var_mean = None
add_1 = torch.ops.aten.add.Tensor(getitem, 1e-05)
rsqrt = torch.ops.aten.rsqrt.default(add_1); add_1 = None
sub = torch.ops.aten.sub.Tensor(convolution, getitem_1)
mul = torch.ops.aten.mul.Tensor(sub, rsqrt); sub = None
squeeze = torch.ops.aten.squeeze.dims(getitem_1, [0, 2, 3]); getitem_1 = None
squeeze_1 = torch.ops.aten.squeeze.dims(rsqrt, [0, 2, 3]); rsqrt = None
mul_1 = torch.ops.aten.mul.Tensor(squeeze, 0.1)
mul_2 = torch.ops.aten.mul.Tensor(clone, 0.9); clone = None
add_2 = torch.ops.aten.add.Tensor(mul_1, mul_2); mul_1 = mul_2 = None
squeeze_2 = torch.ops.aten.squeeze.dims(getitem, [0, 2, 3]); getitem = None
mul_3 = torch.ops.aten.mul.Tensor(squeeze_2, 1.0140845070422535); squeeze_2 = None
mul_4 = torch.ops.aten.mul.Tensor(mul_3, 0.1); mul_3 = None
mul_5 = torch.ops.aten.mul.Tensor(clone_1, 0.9); clone_1 = None
add_3 = torch.ops.aten.add.Tensor(mul_4, mul_5); mul_4 = mul_5 = None
unsqueeze = torch.ops.aten.unsqueeze.default(primals_3, -1)
unsqueeze_1 = torch.ops.aten.unsqueeze.default(unsqueeze, -1); unsqueeze = None
unsqueeze_2 = torch.ops.aten.unsqueeze.default(primals_4, -1); primals_4 = None
unsqueeze_3 = torch.ops.aten.unsqueeze.default(unsqueeze_2, -1); unsqueeze_2 = None
mul_6 = torch.ops.aten.mul.Tensor(mul, unsqueeze_1); mul = unsqueeze_1 = None
add_4 = torch.ops.aten.add.Tensor(mul_6, unsqueeze_3); mul_6 = unsqueeze_3 = None
relu = torch.ops.aten.relu.default(add_4); add_4 = None
le = torch.ops.aten.le.Scalar(relu, 0)
unsqueeze_4 = torch.ops.aten.unsqueeze.default(squeeze, 0); squeeze = None
unsqueeze_5 = torch.ops.aten.unsqueeze.default(unsqueeze_4, 2); unsqueeze_4 = None
unsqueeze_6 = torch.ops.aten.unsqueeze.default(unsqueeze_5, 3); unsqueeze_5 = None
return [add_2, add_3, add, relu, primals_1, primals_3, primals_8, convolution, squeeze_1, le, unsqueeze_6]
得到的loop-level IR会通过下一行的compile_to_fn()进行到 triton 的转化,生成的 triron 代码会存储在/tmp/目录下的.py文件中。返回的值是一个函数compiled_fn,其__module__变量存储着上述的文件路径。
2.7 GraphLowering –> Triton kernel
- 调用
graph.compile_to_fn() - 这个函数会先去调用 graph 中的
compiler_to_module(),对此返回值,取出其 call 属性并返回 - 对于
compiler_to_module(),首先调用self.codegen()来生成 triton 代码(返回一个 py 文件),随后将此代码重命名后返回 - 在 codegen 中,首先调用了
self.init_wrapper_code(),此函数只是检查是否需要使用 cpp 包装,一般都不需要,于是实例化了一个WrapperCodeGen()的对象并返回 - 对 graph 中的 scheduler 进行实例化,调度的对象为
loop-level IR中构造出的东西,实际上可以视为计算节点- 实例化的过程:
- 声明一个空的 node 列表,用于新的构造
- 拿到后续计算所依赖的缓冲区名称
- 遍历传入的参数列表,这里就是在之前传入的列表等,对于列表中的每一个元素,做如下操作:
- 查看此 node 是否存在入度(也就是数据是从什么地方来的,一般为缓冲区名称)
- 对 node 的类型进行查看,在这里由于传入的节点均为 buffer ,因此不会进入
is_no_op函数。接着,判断是否为ComputedBuffer或TemplateBuffer,其中TemplateBuffer给出的解释为Represents a Triton (in the futurue other type) of template operator that we can fuse an epilogue onto.(显然,对于后续的ComputedBuffer都会进入这一条分支,并执行self.get_backend(node.get_device()).group_fn )。对于卷积而言,在这里定义为 ExternKernel。 - 将刚才生成的 node 添加到最开始创建的 node 列表中去
- 做完这部分,接着进行死节点消除与节点融合
- 完成调度后,接着就开始直接生成内核,注意,如果是特殊的算子(例如卷积)是不会被翻译为 triton 的,而是直接生成 aten ,否则,我们会进入 codegen_kernel 阶段。
- 实例化的过程: